Brain Inspired Robotics Applications
Event-driven Vision and Control for UAVs on a Neuromorphic Chip (Intel Loihi) – ICRA 2021
Exploring Event Camera-based Odometry for Planetary Robots
F. Mahlknecht, D. Gehrig, J. Nash, F. M. Rockenbauer, B. Morrell, J. Delaune and D. Scaramuzza
Exploring Event Camera-based Odometry for Planetary Robots. arXiv, 2022 https://uzh-rpg.github.io/eklt-vio/
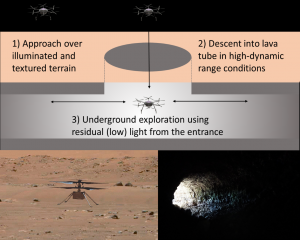
Pic source: https://uzh-rpg.github.io/eklt-vio/